PX4 Firmware 코드 읽기
대상
- px4 코드 이해할려고 하는 분
Tech Map
PX4 이해를 위해 필요한 기술
- control
- embedded programming
- cpp
- nuttx
사전
- px4_overview, px4_hardware, nuttx101
PX4 doxygen
https://pixhawk.ethz.ch/docs/files.html
System
Flight mode
http://dev.px4.io/concept-flight-modes.html
Architecture
http://dev.px4.io/concept-architecture.html
Flight stack
http://dev.px4.io/concept-flight-stack.html
Middleware, uORB
uORB(micro Object Request Broker)
uORB Messaging (pub/sub)
센서의 값주고 받고!
http://dev.px4.io/advanced-uorb.html
주로 탑재하는 센서들의 디바이스 드라이버와 비행 제어를 실행하는 어플리케이션에 이 센서를 연결하기 위해서 미들웨어는 publish-subscribe로 구성된다.
- App간 통신, px4 Middle ware,
- publish() / subcribe() messaging API.
- 반응형 시스템
- 병렬성
- thread-safe
uORB 용어 정리
- node: 프로세스
- topic: 메시지 버스
- advertising: publish하기전에 알리기.
- publish: 메시지 보내기
- subscribing: 구독
uORB
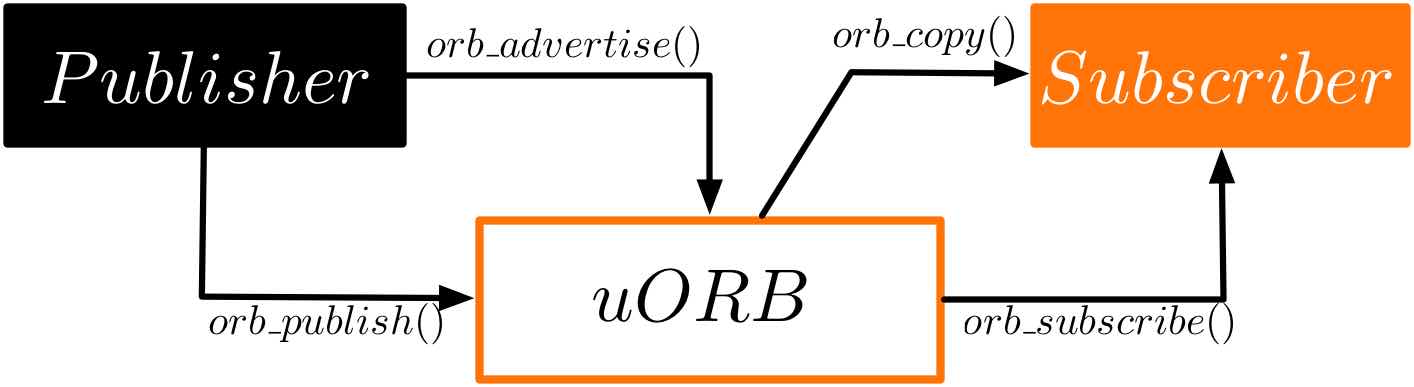
uORB 사용 순서
토픽 Publishing 순서
- 토픽 선언 defining the topic,
- 토픽 핸들 만들기 advertising the topic (publish 되기전에 한번은 advertising해야함)
- 토픽 업데이트 publishing updates.
토픽 Subscribing
- 토픽 아이디 정의 ORB_DEFINE
- 토픽 업데이트 체크 Checking for Updates
- 업데이트된 토픽을의 값을 복사하여 사용 Copying Data from a Topic
관련함수
- ORB_DEFINE/ ORB_DECLARE
- ORB_ID
- orb_subscribe
- orb_advertise
- orb_publish
Firmware 디렉토리 구조
해보기
https://github.com/PX4/Firmware/을 읽어보자.- 각 디렉토리의 역활은?
- /etc/init.d/ 디렉토리를 찾아보자.
- uORB 모듈은 어디에?
- multicopter position 제어 앱?
Read uORB Code
시작 https://github.com/PX4/Firmware/blob/master/src/modules/uORB/uORBMain.cpp
g_dev = uORB::Manager::get_instance()->get_device_master(uORB::PUBSUB);
Read App Code
PX4 Apps
어떤 순서로 읽는가?
- 부팅 순서 px4_boot
- 앱 (테스크)
- 통신(publish/subscribe pattern)
- 시나리오로 읽기
- github issue 하나 잡아서 구현 또는 버그fix commit
- drivers는 인터페이스 읽고 사용예 찾아보기
APP 코드 읽기.
- 읽으려는 기능과 관련된 메인 토픽 찾기. (subscribe, publish)
- 읽으려는 기능의 시나리오 정해서 실행순서대로 코드 읽기.
- 그외에 조연 토픽읽기.
mc_att_control app 읽어보자.
읽을 시나리오: RC input 데이터를 받아서 드론의 자세 제어(att_control)
mc_att_control app uORB Topics
Published messages
- ... Subscribed messages
- ...
시나리오 관련 토픽1
읽으려는 기능: 조정기 수신기에서 조정데이터를 받아서드론의 자세제어를 해보자.
- 읽으려는 기능의 모듈에서 관련된 토픽 찾기.
multicopter 자세제어. 첫시작? mc_att_control 모듈
https://github.com/PX4/Firmware/blob/master/src/modules/mc_att_control/mc_att_control_main.cpp
/Firmware/src/modules/mc_att_control/mc_att_control_main.cpp
사용하는 토픽
#include <uORB/topics/vehicle_attitude_setpoint.h>
#include <uORB/topics/manual_control_setpoint.h>
#include <uORB/topics/actuator_controls.h>
#include <uORB/topics/actuator_controls_virtual_fw.h>
#include <uORB/topics/actuator_controls_virtual_mc.h>
#include <uORB/topics/vehicle_rates_setpoint.h>
#include <uORB/topics/fw_virtual_rates_setpoint.h>
#include <uORB/topics/mc_virtual_rates_setpoint.h>
#include <uORB/topics/control_state.h>
#include <uORB/topics/vehicle_control_mode.h>
#include <uORB/topics/vehicle_status.h>
#include <uORB/topics/actuator_armed.h>
#include <uORB/topics/parameter_update.h>
#include <uORB/topics/multirotor_motor_limits.h>
#include <uORB/topics/mc_att_ctrl_status.h>
시나리오 관련 토픽 2
메인 ORB topics 찾기
기능의 앱코드에서 ORB_ID 키워드 검색해서 토픽을 찾는다.
subscriptions
- ORB_DECLARE(manual_control_setpoint); // Manual RC 입력
publications
- ORB_DECLARE(actuator_controls_0); // 모터 제어
관련 코드 1
사용하는 토픽과 연결된 다른 앱의 코드를 찾는다.
- manual_control_setpoint
- actuator_controls_0
관련코드 찾기
ag manual_control_setpoint |grep ORB_ID |grep orb_publish
ag actuator_controls_0 |grep ORB_ID |grep orb_subscribe
➜ Firmware git:(master) ✗ ag manual_control_setpoint |grep ORB_ID |grep orb_publish
src/modules/mavlink/mavlink_receiver.cpp:1456: orb_publish(ORB_ID(manual_control_setpoint), _manual_pub, &manual);
src/modules/sensors/sensors.cpp:2216: orb_publish(ORB_ID(manual_control_setpoint), _manual_control_pub, &manual);
src/modules/sensors/sensors.cpp:2216 앞을 읽어본다.
해보기
- manual_control_setpoint는 rc 입력에서 받기 위해 또다른 토픽을 구독한다. rc 입력을 직접 관장하는 토픽은 무엇인지 찾아보자.
topic declear
Firmware/build_px4fmu-v2_default/src/modules/uORB/topics/
src/modules/sensors/sensors.cpp:2493 _rc_sub = orb_subscribe(ORB_ID(input_rc));
해보기
- actuator_controls_0는 모터제어를 하는 토픽이다. actuator_controls_0이 모터를 제어하는 흐름을 찾아보자.
- mc_att_control 실행을 순서도로 표현해보자.
actuator_controls_0 -> motor
ag actuator_controls_0 |grep ORB_ID |grep orb_subscribe
src/drivers/pwm_out_rc_in/pwm_out_rc_in.cpp
orb_publish(ORB_ID(actuator_outputs), _outputs_pub, &_outputs);
src/drivers/px4io/px4io.cpp:
orb_publish(ORB_ID(actuator_outputs), _to_outputs, &outputs);
orb_publish(ORB_ID(multirotor_motor_limits), _to_mixer_status, &motor_limits);
mc_att_control 순서도
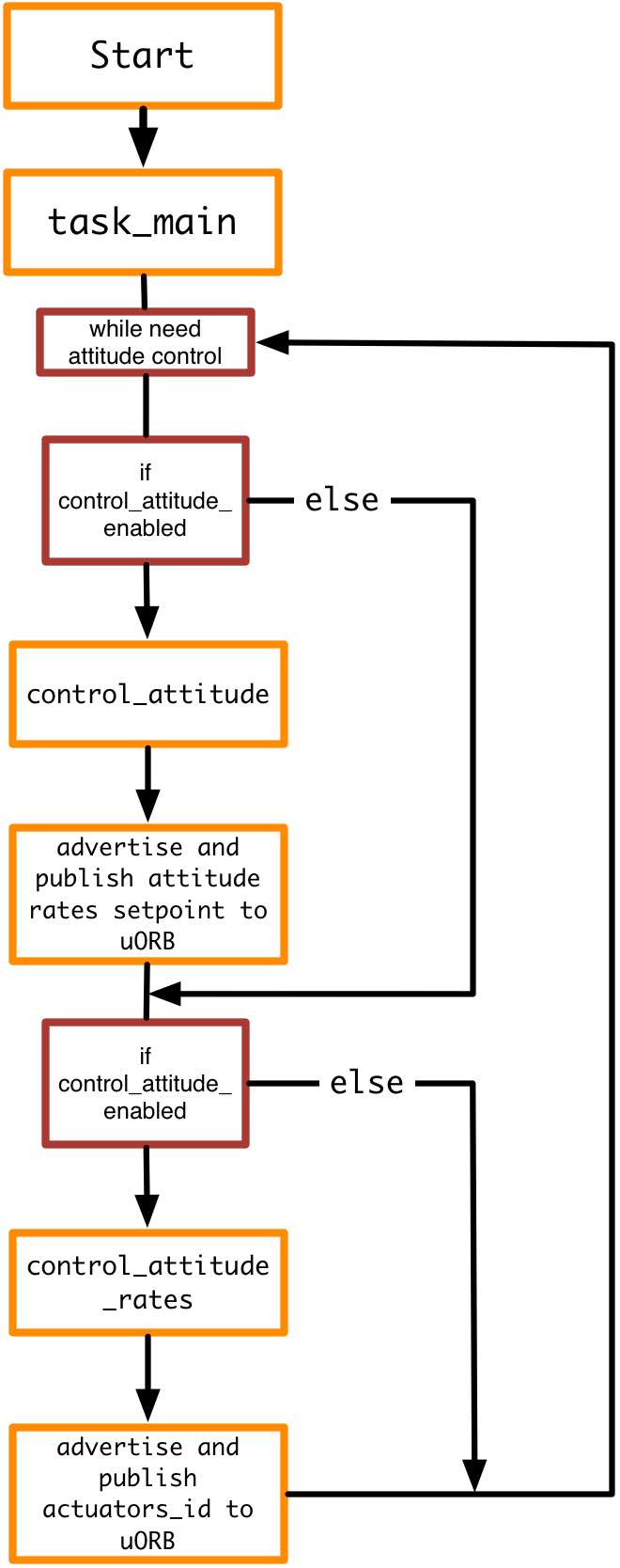
PX4의 Attitude rates controller 코드를 읽어보자

MulticopterAttitudeControl::control_attitude_rates(float dt)
https://gist.github.com/donghee/e900bed6623e4dca42b49fa5f6746493
PX4의 Attitude controller 코드를 읽어보자

void
MulticopterAttitudeControl::control_attitude(float dt)
https://gist.github.com/donghee/47861a70fb1df25afef51c87d898ef07
PX4의 Sensor Fusion 코드를 읽어보자.
https://github.com/PX4/Firmware/blob/master/src/modules/ekf2/ekf2_main.cpp
_ekf.setIMUData() // 1. Set accel, gyro
_ekf.update() // 2. Fusion. Ref: https://github.com/PX4/ecl/blob/master/EKF/ekf.cpp#L197 https://github.com/PX4/ecl/blob/master/EKF/ekf.cpp#L553
_ekf.copy_quaternion(q.data()); // 3. Get attitude
// Attitude quaternion
ctrl_state.q[0] = q(0);
ctrl_state.q[1] = q(1);
ctrl_state.q[2] = q(2);
ctrl_state.q[3] = q(3);
참고:
- http://users.cecs.anu.edu.au/~trumpf/pubs/khosravian_trumpf_mahony_hamel_ACC2015.pdf
- http://www.olliw.eu/2013/imu-data-fusing/
px4 코드 읽기. 다시!
- 읽으려는 기능과 관련된 메인 토픽 찾기. (subscribe, publish)
- 읽으려는 기능의 시나리오 정해서 실행순서대로 코드 읽기.
- 그외에 조연 토픽읽기.
- 토픽데이터를 계산하는 코드 읽기.
- 잘 이해안가면px4 용어와 컨셉을 다시 체크한다.
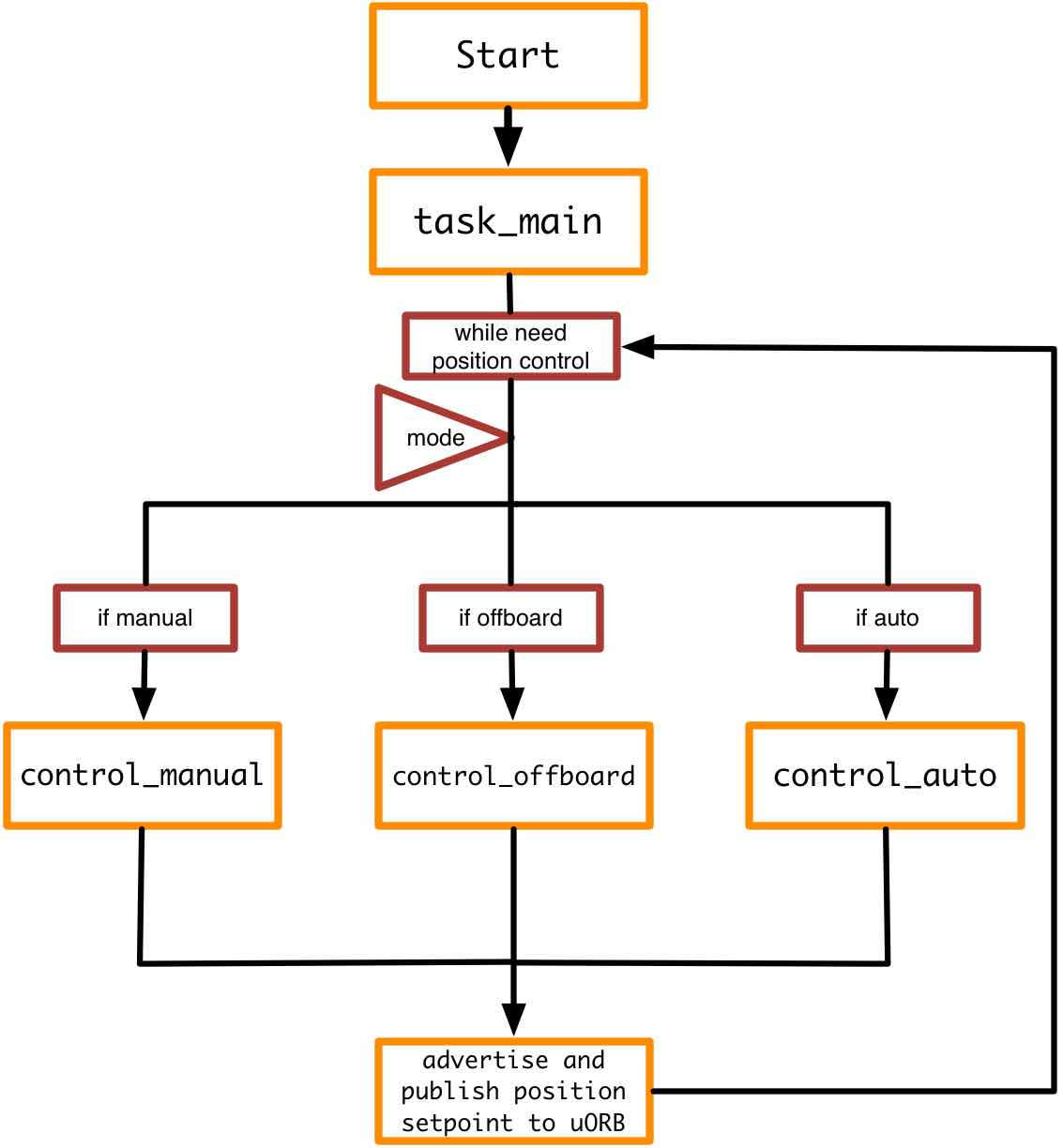
주요앱 분석: mc_pos_control
APP 실행 순서대로 읽어보자.
mc_pos_control
/Firmware/ROMFS/px4fmu_common/init.d/rc.mc_apps
mc_pos_control start
/Firmware/src/modules/mc_pos_control/mc_pos_control_main.cpp
- start()
- task_main_trampoline()
- task_main() subscribe topic
- control_manual() start
- control_offboard() start
- control_auto() start
- task_main() topic publish
- vehicle_global_velocity_setpoint
- vehicle_local_position_setpoint
- _attitude_setpoint_id
Making Apps
APP 만들기.
- 기존의 예제 앱을 변형 한다.
- 새로운 앱 만들기
- 토픽을 연결한다.
- 토픽이 없으면 새로운 토픽을 만든다.
- 드라이버가 없으면 드라이버를 만든다.
PX4 Daemon App
https://github.com/PX4/Firmware/blob/master/src/examples/px4_daemon_app/px4_daemon_app.c
PX4 Blink App
PX4 AUXOUT1의 신호선과 GND사이에 LED를 연결하자.
/Firmware/src/modules/gpio_led/gpio_led.c
을 실행하자.
해보기
- gpio_slow_led 앱을 추가하여 gpio_led 앱에서 실행하는 것보다 10배 천천히 LED가 제어되도록 만들어 보자. (힌트 src/modules/gpio_slow_led, cmake/configs/nuttx_px4fmu-v2_default.cmake